最近,关于“舱驾一体”的讨论又热了起来,感觉有“立刻马上就会实现”的样子。
这个热度的背景是,智驾和智舱两个板块已基本实现域内融合,正在往中央计算单元的方向努力进发。
而且,随着城区NOA的相继落地,智能驾驶无疑成为2024年最聚焦的竞争领域。
高阶智驾上,各家车企的投入决心,无疑都非常坚定。而在低阶智驾上,则是单芯片的“舱泊一体”和“行泊一体”等方案大行其道,以性价比快速覆盖到全系车型。
特别是,从2022年9月开始,英伟达和高通的“One Chip”解决方案相继出台,且相继推出面向中央计算架构的DRIVE Thor和骁龙Snapdragon Ride™ Flex SoC,包括国内的黑芝麻智能的C1200芯片和跨域计算芯片平台“武当”系列等,舱驾一体正加速而来。
那么,舱驾一体,马上就要实现了?
未必,这场Tier1们推动的技术趋势,“只见楼梯响,人还没下来”。本文就是分析一下,这种融合到了哪个程度。
当然,车企已经“卷”入全面的效率战场,组织整体性、产业链的掌控度,都将决定每家车企智驾和智舱的推进节奏。
但至少,舱驾一体这一技术走势会遭遇车企的“部门墙”,组织震荡在所难免。理想正在照进现实,但一口吃不成个胖子。
舱驾一体开打
简单讲,所谓“舱驾一体”,也叫舱驾融合,顾名思义即将域控制器的智驾域和座舱域实现高度集成,统一到中央计算单元中,以期实现硬件、软件和应用的全面打通,从而提升用户体验,同时,缩短开发周期,降低整车成本。
此前,这两个域之间是彼此独立的,也叫Two Box/Two Board。
而舱驾一体则是致力于实现One Box/One Board/One Chip,简单说,就是一个盒子两块板、一块板两个芯片、一块板一个芯片三个阶段。真正意义上的“舱驾一体”是One Chip,即在一颗SoC芯片上同时运行智驾域和智舱域。
就目前来看,域集中架构下,智驾域和座舱域已经实现域内融合,并且份额在快速提升。
根据盖世的相关数据,2023年中国市场座舱域控(前装标配)交付量达到347.6万套,搭载率提升到16.5%。智驾域控(前装标配)交付量为183.9万套,搭载率提升到8.7%。
不过,由于更高的系统集成度,“舱驾一体”落地面临较大挑战,技术层面、市场层面和成本层面的难点都不小。所以,虽然是趋势和行业共识,就好像前两年的行泊一体一样,但我们不用像李一舟卖课那样给搞得如此“蕉绿”。
从三个阶段来说,One Box方案实际算是一个噱头和概念,会率先实现,但能够提升的性能和降本程度有限。而One Board方案对主板的设计能力要求高,也可能直接进入One Chip方案。
真正意义上的舱驾一体,也就是One Chip方案,则严重依赖于芯片,需要等到SoC芯片量产。根据行业人士的分析来看,预计会在3年左右时间实现。再到车企能够大面积落地,还有段时间的。
而且,从舱驾一体的成本角度来说,也不是那么明确,优势、劣势都有。
优势方面,从显性成本来说,不论是One Box/One Board/One Chip方案,硬件上都能减少域控投入、芯片投入,以及线束数量、硬件成本都有所下降。而且,随着供应商数量的降低,供应链的管理成本也相应降低。
但是,看不见的各种隐性成本,却有上升。
比如,上层生态的迁移、软件的适配复杂度与难度加大,随着两域融合程度的提高会大幅提升,研发成本增加。而且,智驾域与座舱域对功能安全要求不同,满足车规级要求的成本也比之前高很多。
还有就像前面说到的,车企内部需要打通部门墙、推动组织架构融合才能提升效率,但时间成本较高。此外,One Chip方案短期内也难以实现平台化、标准化、规模化。
不管怎么说,英伟达和高通两家发布芯片和解决方案的企业率先发动攻势之下,各有拥趸,车企和Tier1们对此也是纷纷响应,一场大战一触即发。
比如,理想汽车、极氪汽车和哪吒汽车等新势力车企,均已确认将在未来新车上使用英伟达的DRIVE Thor,其中首发搭载DRIVE Thor的极氪新车计划于2025年上市。
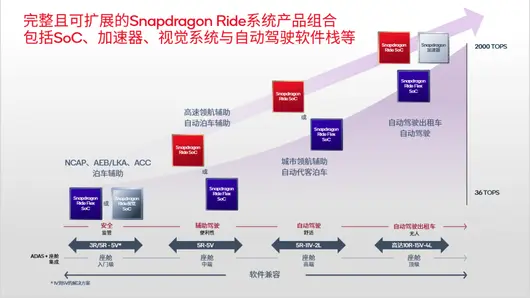
而高通的Snapdragon Ride™ Flex SoC成为众多Tier1的首选。
像中科创达子公司畅行智驾、镁佳科技以及车联天下等,也都于CES 2024期间展示了基于这款芯片的域控制器,并推动舱驾一体的快速发展。
具体的技术难点
那么,舱驾一体的技术难点体现在哪些地方呢?
首先,满足要求的SoC芯片还未落地。目前,市面上还没有一款SoC芯片,能够同时具备大的GPU算力和大的NPU算力,还停留在座舱专用芯片或智驾专用芯片的水平,因此舱驾整体解决方案实现基本上靠的是多芯片。
就现实而言,像零跑的“四叶草”架构,高配方案采用的是“高通SA8295+英伟达Orin+恩智浦S32G”,亿咖通的Super Brain,是“芯擎科技龙鹰一号+黑芝麻智能A1000”,德赛西威的车载智能中央计算平台ICP Aurora,是英伟达Orin+高通SA8295+黑芝麻华山A1000,都是多芯片方案。
而到真正的One Chip,这些结构性的东西都得重新设计,都是成本吧。
为什么呢?因为,座舱芯片主要的计算任务是图形处理,包括渲染等,对GPU的算力要求高。而智驾芯片主要的计算任务是深度学习,对NPU的算力要求高。
即使目前已经有高通、英伟达、黑芝麻相继推出支持舱驾一体的芯片,两款芯片均号称达到2000TOPS,但毕竟要到今年年底和2025年才能正式量产,业内还只能处于观望状态(当然,有的车企内部肯定已经开始拿样品做测试)。
此外,两域融合的操作系统的布署有难度。对于座舱域来说,操作系统基于QNX或Andriod语言编写,而智驾域的操作系统大多基于Linux或C++语言,两种操作系统本身就是难以兼容的。
众所周知,操作系统是汽车上层应用算法的基础,就像大众的电动化受阻,就是源于vw.OS系统没搞好。
所以,到了舱驾一体的程度,尤其是One-Chip方案,必然要求操作系统高度集成。而在同一块芯片上布署两套不同的操作系统,绝对是一大难题。

还有一个现实问题是,由于智能驾驶与行车安全之间存在紧密的耦合关系,这使得智驾域在安全性、稳定性、可靠性以及响应速度等方面的要求明显高于座舱域。
相对而言,座舱域则更多聚焦于用户交互体验,以及车载娱乐系统的优化升级,对系统功能的多元化以及持续迭代有着较高的要求。
说到底,舱驾一体,是要集成为一个域控制器来同时搭载座舱域和智驾域的硬件,满足现实应用需求,One Chip方案的结构整体设计方面难度很大。
再比如,对于One Board方案,即使仅仅需要一块板上集成两块SoC芯片,也要同时兼顾相关的其他元器件,板的面积会增大不说,也会增加整体体积,包括电路板也得重新设计。
还有散热问题,无论是One Box/One Board/One Chip,由于集成了座舱域和智驾域的大量计算任务和数据处理,功耗不是简单的1+1=2,而是两个域功能的叠加,发热量更高,对散热能力提出了更高的要求。实际上,最终仍然挑战的仍然是域控制器的整体设计能力。
所以,如何充分满足两个域对于安全性、实时性等不同的要求,融合过程中怎么进行不同功能安全等级的隔离、资源调度、跨域适配,以及合理的功耗及成本控制,快速的测试验证和工程化落地,都是不容回避的话题。
所以,目前虽说舱驾一体是趋势,但是市场并没有强烈的舱驾一体需求,并没有到达Must have的程度。
对于主机厂来说,当下更多精力还是在分别提升座舱和智驾的水平上,对于两者的融合,也没有迫切的需求。合有合的好处,分有分的现实考量。
由此也可以看出,在整车E/E电子电气架构从传统分布式往域集中式架构演变中,舱驾一体虽然为整车智能化的演进带来了丰富想象空间,真正落地并不容易。
相关行业人士也指出,甚至整个行业可能都会面临产业链格局重塑、人员能力培养、流程设计、技术迭代等全新要求。
当然,目前行业內的“整零关系”也在快速发生变化,有些新型的OEM合作已由过去的垂直模式变革到现如今的网状模式,即以OEM为中心,电子系统Tier1、软件系统Tier1、半导体供应商Tier2和ICT企业相互协作。
一场更激烈的竞争洗牌与深度整合,正悄然来临。我们等着好戏上演。



